Все-таки дошло до меня, почему дипсик так упорно тыкал в меня "классическим" ПИД, где вычисляется именно скорость движения в следующем цикле, а не поправка. Ведь фактически "воздействие", вычисленное по формуле ПИД, дает величину смещения, которое нужно пройти за следующий цикл. Соответственно, скорость на этом этапе должна быть равна отношению "воздействия" к длительности цикла, dt.
А вот на мелких отклонениях, когда идем уже "ноздря в ноздрю", такой расчет приведет к осцилляциям. Поэтому нужно брать какую-то небольшую часть отношения "воздействия" к dt и суммировать с текущей скоростью. Вот такая ошибка получается после выхода на режим сопровождения (ошибка < 0.1 условной единицы). Шум в пределах ±0.02 имитирует дребезг младших разрядов энкодера. Скачок на t=30 - тоже имитация реального скачка (например, от порыва). В промежутке t=20÷30 координата постоянна, далее опять возвращается к движению по синусоиде.
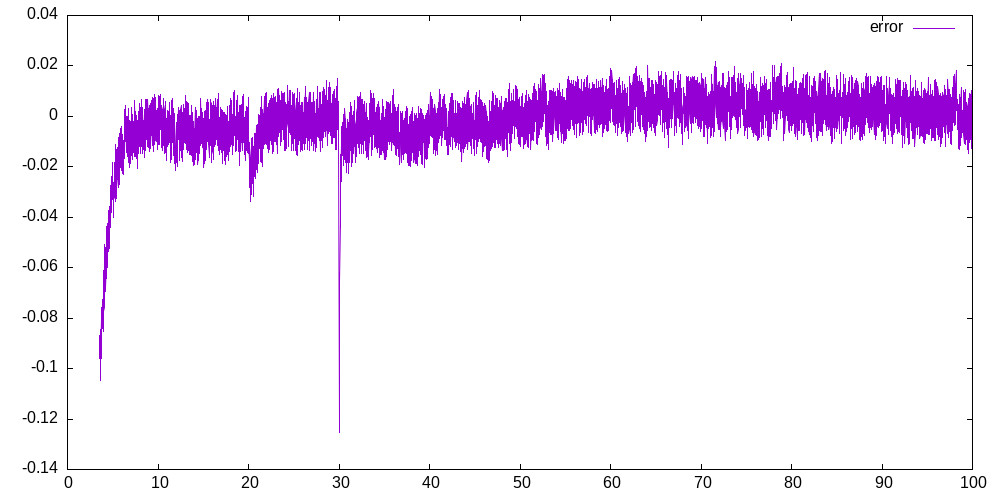
Ну не красота ли?
Аж не верится, что такая красота получается. Покуда я для всех случаев считал v+dv(e) (т.е. постоянно вносил аддитивную компоненту, из-за чего "телескоп" быстро разгонялся, а потом "пролетал" мимо цели и осциллировал), у меня было достаточно уродливо, и ошибка редко была в допуске.
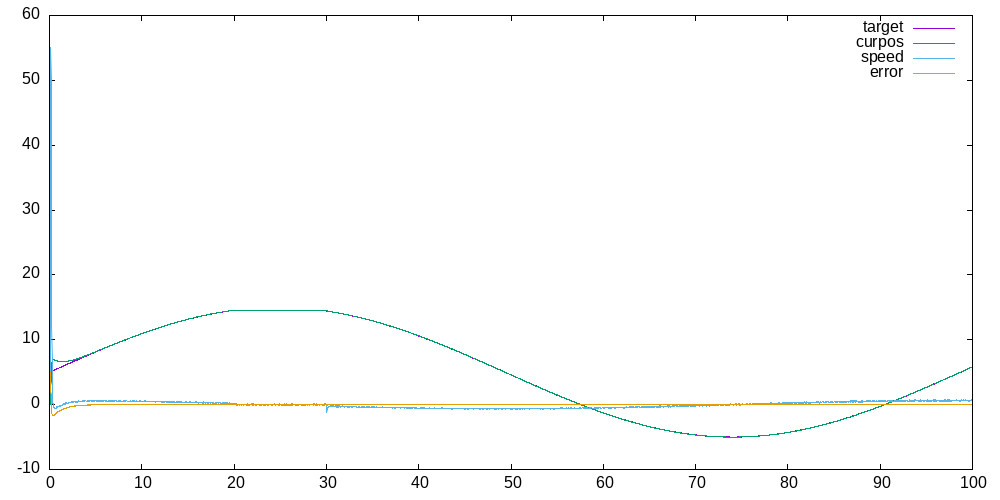
Наведение и отслеживание, 100 секунд.
А вот так оно ведет себя в самом начале:
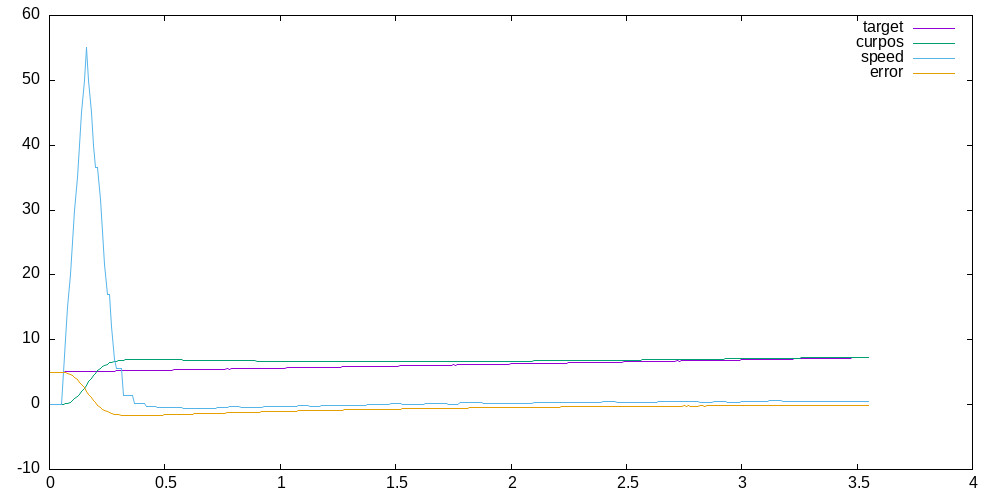
Начало наведения: выход на режим отслеживания.
P-компонента "проскакивает" нужное положение, но D ее "утягивает" куда нужно. Вот с I ничего хорошего в данном случае не вышло: только осцилляции добавляет. Но в данном случае оно и понятно: т.к. я итог делю на dt, то фактически I-компонента становится P, P превращается в D, а D становится второй производной. Но как "натянуть" честный ПИД на вычисление скорости по координате — не представляю. Сами вычисления:
Вот, еще думаю: стоит ли сбрасывать предыдущие значения ПИД при переходе между режимами "сверху вниз" (т.е. с улучшением точности)?
А вот на мелких отклонениях, когда идем уже "ноздря в ноздрю", такой расчет приведет к осцилляциям. Поэтому нужно брать какую-то небольшую часть отношения "воздействия" к dt и суммировать с текущей скоростью. Вот такая ошибка получается после выхода на режим сопровождения (ошибка < 0.1 условной единицы). Шум в пределах ±0.02 имитирует дребезг младших разрядов энкодера. Скачок на t=30 - тоже имитация реального скачка (например, от порыва). В промежутке t=20÷30 координата постоянна, далее опять возвращается к движению по синусоиде.
Аж не верится, что такая красота получается. Покуда я для всех случаев считал v+dv(e) (т.е. постоянно вносил аддитивную компоненту, из-за чего "телескоп" быстро разгонялся, а потом "пролетал" мимо цели и осциллировал), у меня было достаточно уродливо, и ошибка редко была в допуске.
А вот так оно ведет себя в самом начале:
P-компонента "проскакивает" нужное положение, но D ее "утягивает" куда нужно. Вот с I ничего хорошего в данном случае не вышло: только осцилляции добавляет. Но в данном случае оно и понятно: т.к. я итог делю на dt, то фактически I-компонента становится P, P превращается в D, а D становится второй производной. Но как "натянуть" честный ПИД на вычисление скорости по координате — не представляю. Сами вычисления:
static double getNewSpeed(const moveparam_t *p, double targcoord, double dt){
double error = targcoord - p->coord, fe = fabs(error);
switch(state){
case Slewing:
if(fe < MAX_POINTING_ERR){
pid_clear(&pid);
state = Pointing;
green("--> Pointing\n");
}else{
red("Slewing...\n");
return (error > 0.) ? limits.max.speed : -limits.max.speed;
}
break;
case Pointing:
if(fe < MAX_GUIDING_ERR){
pid_clear(&pid);
state = Guiding;
green("--> Guiding\n");
}else if(fe > MAX_POINTING_ERR){
red("--> Slewing\n");
state = Slewing;
return (error > 0.) ? limits.max.speed : -limits.max.speed;
}
break;
case Guiding:
if(fe > MAX_GUIDING_ERR){
red("--> Pointing\n");
state = Pointing;
}else if(fe < G.minerr){
green("At target\n");
//pid_clear(&pid);
//return p->speed;
}
break;
}
red("Calculate PID\n");
double oldi = pid.pidIarray[pid.curIidx], newi = error * dt;
pid.pidIarray[pid.curIidx++] = oldi;
if(pid.curIidx >= pid.pidIarrSize) pid.curIidx = 0;
pid.integral += newi - oldi;
double derivative = (error - pid.prev_error) / dt;
pid.prev_error = error;
DBG("P=%g, I=%g, D=%g", pid.kp * error, pid.integral, derivative);
double add = (pid.kp * error + pid.ki * pid.integral + pid.kd * derivative);
if(state == Pointing) add /= 3.;
else if(state == Guiding) add /= 7.;
DBG("ADD = %g; new speed = %g", add, p->speed + add);
if(state == Guiding) return p->speed + add / dt / 10.;
return add / dt;
}
Вот, еще думаю: стоит ли сбрасывать предыдущие значения ПИД при переходе между режимами "сверху вниз" (т.е. с улучшением точности)?